







MP6500 - Драйвер шагового двигателя 35В / 2,5А - с аналоговой регулировкой тока - вмонтирован - Pololu 2967 6035269
1 070 ₴
- Под заказ
- Код: 6035269
 Отправка с 02 июня 2026
Отправка с 02 июня 2026
Описание продукта: MP6500 - Драйвер шагового двигателя 35В / 2,5А - с аналоговой регулировкой тока - вмонтирован - Pololu 2967
Система позволяет управлять шаговым двигателем с помощью устройства, который позволяет создавать логические состояния, напримерArduinoSTM32Discovery, Raspberry Pi или любой другой микроконтроллер. Модуль Pololu очень прост в использовании. Чтобы вернуть двигатель на один шаг, подайте высокий уровень на вывод STEP (логичная единица), другую последовательность нулей и единиц переместит двигатель на один шаг, и так далее. Clock, High state - навпаки). В контроллере также есть возможность выбора разрешения работы двигателя.
Техническая спецификация контроллера
- Напряжение питания двигателя: от 4,5 В до 35 В
- Струм: макс. 1.8 А на катушку (с охлаждением до 2,5 А)
- Напряжение питания логической части: от 3,3 В до 5 В
- Простой интерфейс управления
- Работа в 4 различных режимах: полный шаг, 1/2, 1/4 и 1/8
- Возможность регулировки тока, потребляемого двигателем, с помощью потенциометра
- Защита от перегрева системы
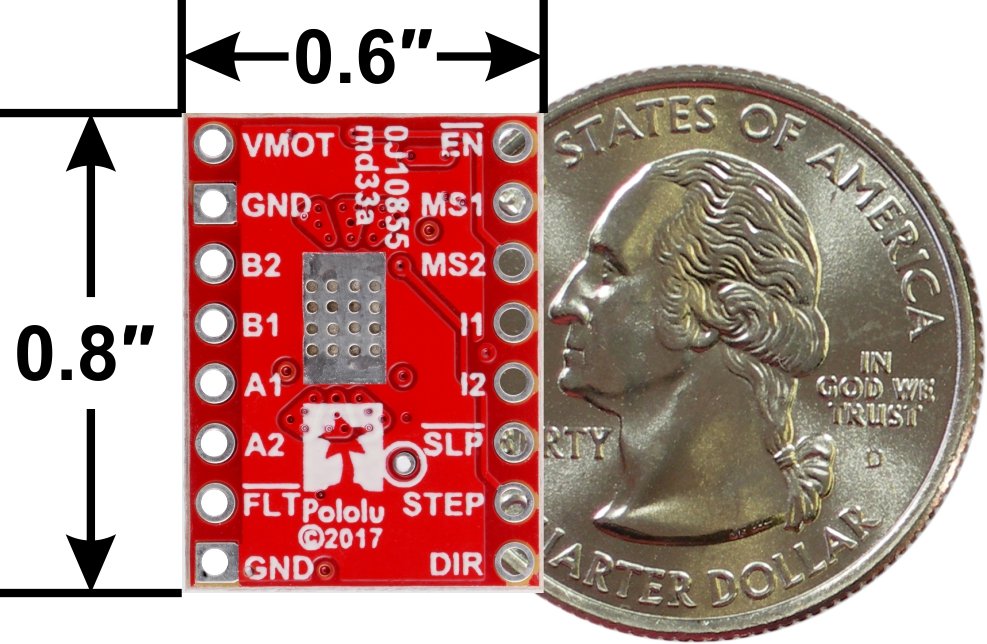
- Размеры модуля: 20 x 15 мм
Модуль имеет припаянные золотые штифтовые разъемы. Мы также предлагаем версию без установленных разъемов. |
Подключение блока управления
Для управления биполярным шаговым двигателем подключите систему, как показано на следующем рисунке. Если вы управляете однополюсным двигателем, обратитесь к инструкции. Если номинальное напряжение двигателя меньше, чем необходимое для питания контроллера (4,5 В), ограничения тока необходимо установить вручную с помощью потенциометра.

На рисунке показано минимальное подключение контроллера. Между подключением питания двигателя и заземлением следует установить резистор +/- 100 мкФ
Блок питания MP6500
Для питания логической части модуля необходимо напряжение в диапазоне от 2,5 В до 5 В, которое подается на Спать.-штифт должен быть направлен. На вывод подается напряжение питания двигателя в диапазоне от 4.5 В до 35 В. VMOT .Система может управлять двигателями с номинальным напряжением ниже необходимых 4.5 В. Для этого следует ограничить максимальный ток потребления, чтобы не превысить допустимый ток двигателя. Пример: Для двигателя с сопротивлением 5 Ом на катушку и током потребления 1 А номинальное напряжение питания составляет 5 В. При питании 12 В ток следует ограничить так, чтобы он не превышать 1 А.
Осторожно. Подключение и отключение двигателя при включенном блоке управления может привести к повреждению системы. |
Разрешение и размер шага
Размер шага определяется входными даннымиMS1,MS2выбран. Возможны настройки приведены в следующей таблице. Входы MS1 и MS2 имеют внутренний подтягивающий резистор (500кОм).
| MS1 | MS2 | Резолюция |
| низкий | низкий | Полный шаг |
| высокий | низкий | 1/2 шага |
| низкий | высокий | 1/4 шага |
| высокий | высокий | Шаг 1/8 |
Другие входные данные
Импульс, поданный на вывод STEP, заставляет двигатель делать шаг в выбранном направлении, устанавливая вывод DIR в соответствующее логическое состояние. Если двигатель должен вращаться всего в одном направлении, вывод DIR может оставаться отключенным.
Система имеет два различных входа для управления питанием: SLEEP и ENBL, описание которых содержится в документации.Обратите внимание, что драйвер подключает эти два вывода через внутренние резисторы 500 кОм. По умолчанию состояние SLEEP не позволяет двигателю работать, его нужно установить на высокий уровень (его можно подключить непосредственно к логическому источнику питания 2,5-5 В или управлять им, подключившись к цифровому выходу MCU). По умолчанию состояние ENBL включено на драйвере, его можно отключить.
Выход FAULT отключается, когда мосты F и H выключаются из-за перегрузки по току, перенапряжения, теплового отключения или защиты от пониженного напряжения. Он включается через 10 кОм-резистор подключен к выходу SLEEP, который функционирует аналогично FAULT. Когда SLEEP высокий, подключение FAULT не требуется.
Осторожно. Подключение SLEEP и FAULT и возникновение ошибки может привести к тому, что напряжение на выводе SLEEP упадет ниже 2,1 В, если она недостаточно усилена. Рекомендуется использовать резистор номиналом не менее 4.7 МЕм.kΩ с помощью этого кабеля или подключите SLEEP непосредственно к VCC. |
Ограничение тока
Систему можно приводить в действие двигателями с номинальным напряжением ниже необходимых 4.5 В. Для этого максимальный потребляемый ток должен составлятьограничивается потенциометромчтобы не превысить допустимый ток двигателя. Пример: Для двигателя с сопротивлением 5 Ом на катушку и током потребления 1 А номинальное напряжение питания составляет 5 В. При питании 12 В ток следует ограничить так, чтобы он не превышать 1 А.
Модуль MP6500 позволяет активно ограничивать ток с помощью потенциометра. Один из способов ввести ограничение - перевести контроллер в полноступенчатый режим и измерить протекающий ток через одну катушку, без подачи сигнала на вход STEP. Измерительный ток составляет 70% от установленной границы (ободковые катушки всегда включены и ограничены 70% в режиме полного шага). Другая возможность - измерить напряжение на выводе VREF (назначен кружочком на плате) и рассчитать предельный ток (измерительные резисторы имеют номинал 0,05 Ом). Более подробную информацию можно найти вдокументация MP6500.
Отвод тепла
Печатная плата рассчитана на отвод тепла при потреблении тока около 1.8 А на катушку. Если ток значительно выше, следует использовать внешний теплоотвод, который можно закрепить с помощью теплопроводного клея.
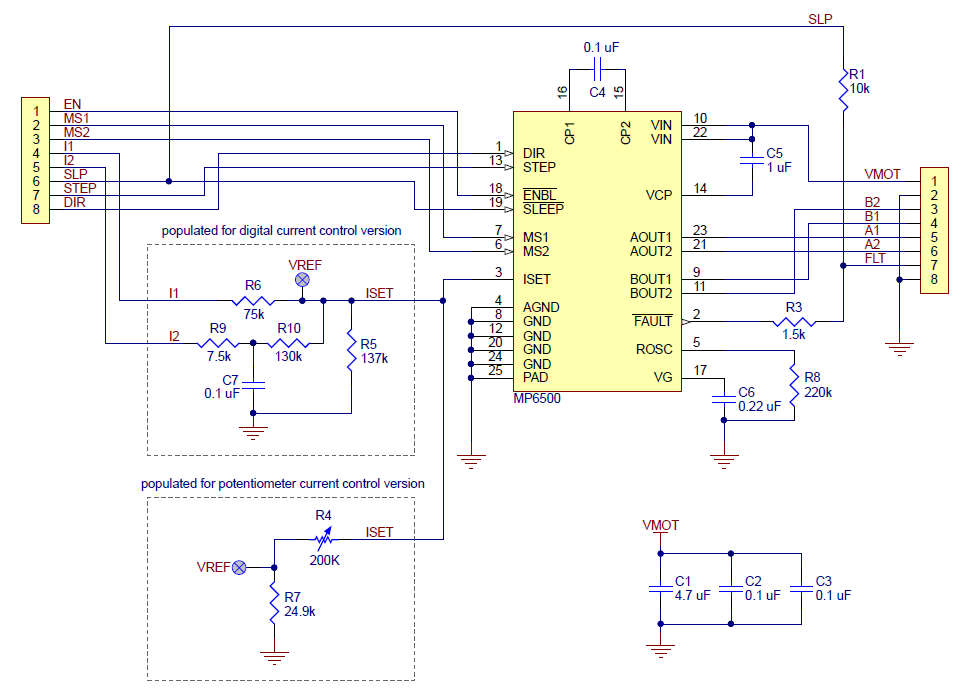
Схема размещения
Система содержит необходимые пассивные компоненты для корректной работыКонтролери. Схема подключения показана на следующих рисунках.
Полезные ссылки
|
| Основные | |
|---|---|
| Производитель | Arduino |
| Состояние | Новое |
- Цена: 1 070 ₴